自動運転 - 交差点における状況認識と行動計画
Autonomous Driving
- Scene Understanding and Motion Planning at Intersections
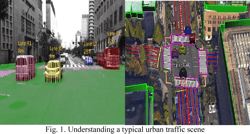
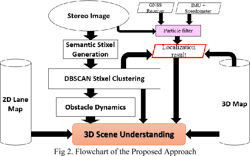
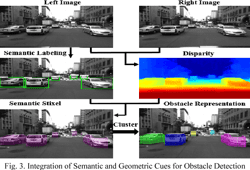
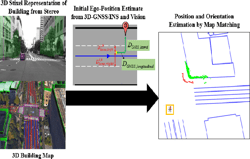
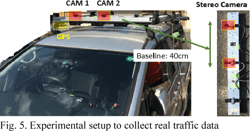
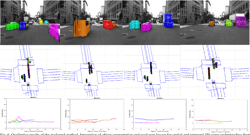
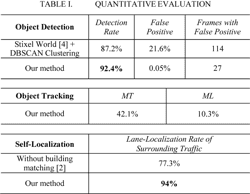
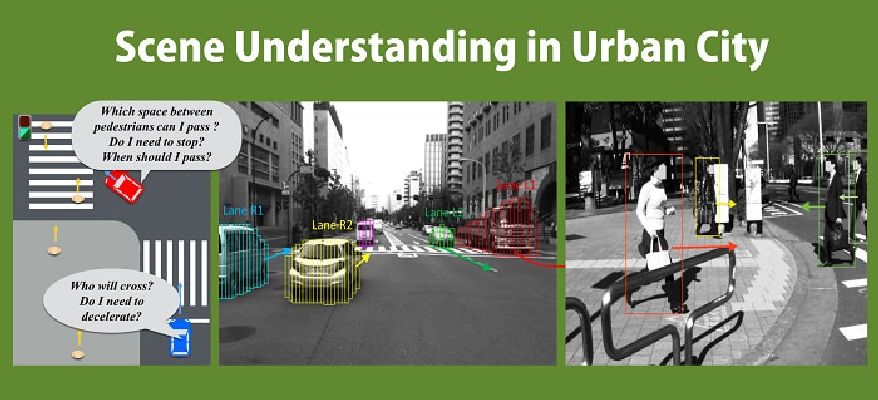
都市の交差点は非常に複雑で正確に状況を理解することは難しいです。 しかし、自動運転車の安全な運航には複雑な都市の交差点を包括的に理解することは欠かせない課題です。 そのため本研究では、都市の交差点での交通状況を空間的および時間的に分析するためのステレオビジョンおよび3Dディジタルマップベースのアプローチを提案します。 ステレオビジョンは、物体検出、分類、追跡に使用され、3Dディジタルマップは自己位置推定と周囲のコンテキスト情報の取得にそれぞれ利用されます。 これらの幾何学的、意味的、動的情報を時間的に統合する確率論的アプローチを提案します。 東京の実際の交通データに対し本手法を定性的および定量的に評価し、システムの有効性を実証します。
The driving behavior at urban intersections is very complex. It is thus crucial for autonomous vehicles to comprehensively understand challenging urban traffic scenes in order to navigate intersections and prevent accidents. In this paper, we introduce a stereo vision and 3D digital map based approach to spatially and temporally analyze the traffic situation at urban intersections. Stereo vision is used to detect, classify and track obstacles, while a 3D digital map is used to improve ego-localization and provide context in terms of road-layout information. A probabilistic approach that temporally integrates these geometric, semantic, dynamic and contextual cues is presented. We qualitatively and quantitatively evaluate our proposed technique on real traffic data collected at an urban canyon in Tokyo to demonstrate the efficacy of the system in providing comprehensive awareness of the traffic surroundings.